
We concluded in a previous post that the distribution of errors are different for the AZ and EL resolvers. To make it clear, we propose to swap the sensors, using now the AZ resolver on the EL chain and vice versa.
We ran the same protocol as described in a previous post.
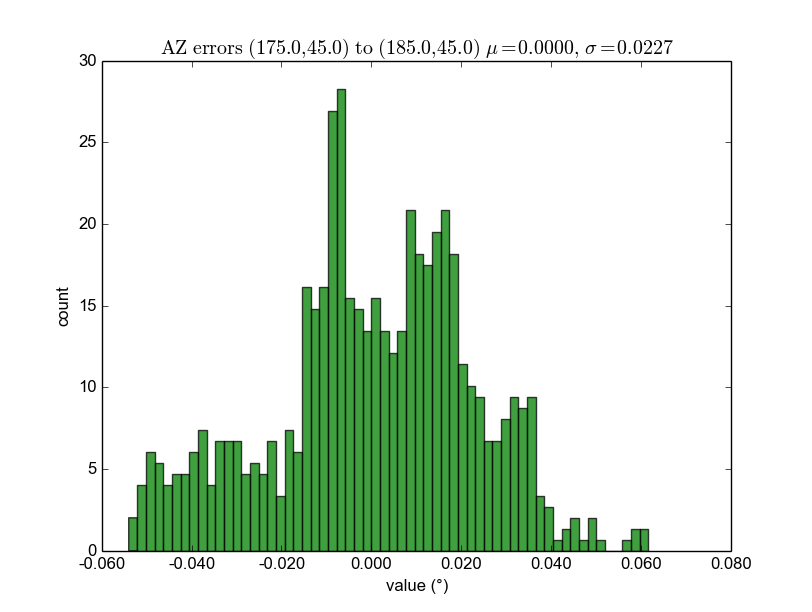
The following picture shows the distribution of AZ errors using the default EL resolver:
Next picture is for EL (with the default AZ resolver):
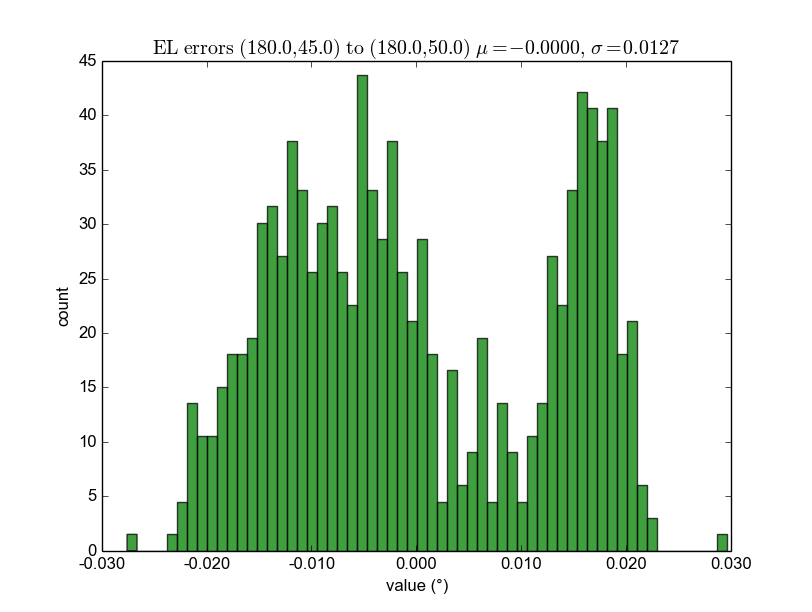
To conclude, the distributions do not change, we can’t incriminate the resolvers.
We have to find something else. The last option is to investigate the mechanism that gives momentum to the rotor of the resolver.